Camera driven line following
Basics of computer vision
Used tools, methods and technologies:
- Raspberry Pi 4, Pi Camera
- Python, OpenCV lib, ssh
- Lego hardware, basic circuit

Messy electronics, rather look to my Fritzing schematics.

Power by two 2600mAh 3.7V rechargable batteries.


Live video is being shared from the Raspberry. Its live-stream of what the robot sees. Grayscaled and one with contours drawn.

Vertical design

Isn´t it cute?
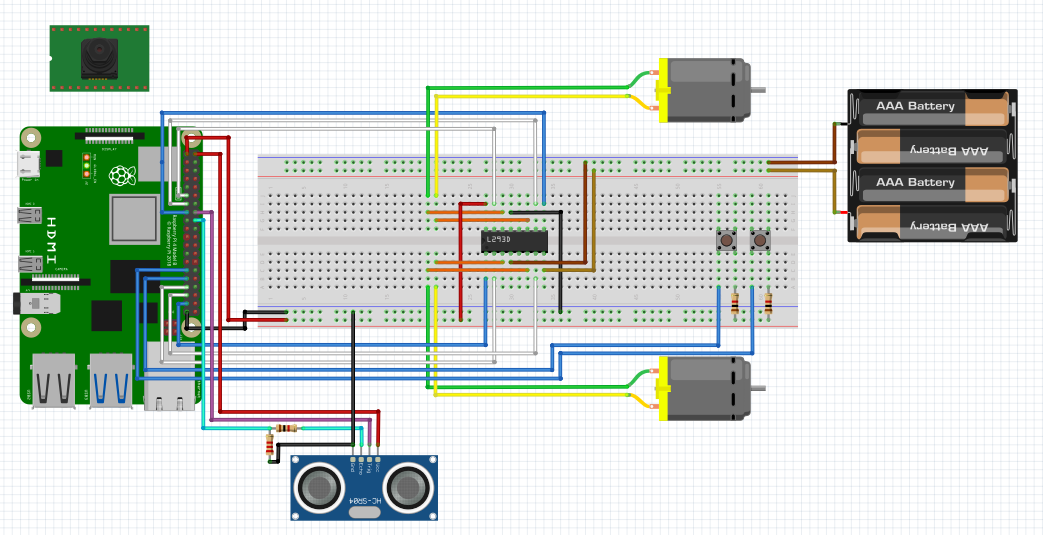
Exact schematics, just the bateries are different.